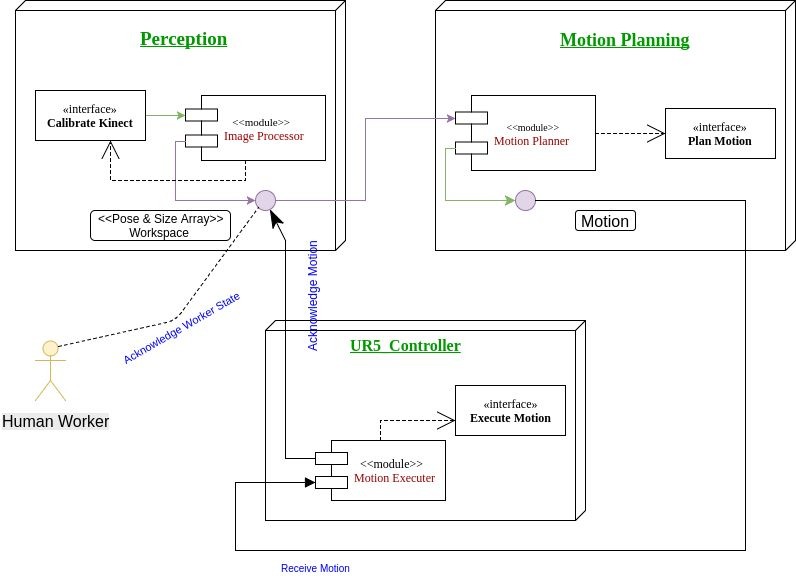
Robotic arm application that collaboratively operates with human workers in a shared workspace. The application involves Motion Planning and Object&Human parts(torso, arms) Recognition. The end product has been ported with a safety layer that stops the robot at the instant there is an unpredictable force given to the joint ESCs. The perception system recognizes a human worker around it with perfect accuracy (with a non-learning image recognition method, this is ensured, but with more assumptions in the workspace). After human worker leaves the workspace, the robot continues its groovy Pick&Place task, if the condition for picking still satisfies. Otherwise it goes back to its rest pose.