Project Overview
MoveIt is a motion planning framework that can be adapted for a wide range of fixed-base robots. The core idea behind this project was to introduce MoveIt GUI capability for Hector Quadrotor, a well-known open-source Gazebo quadrotor stack.
Using MoveIt for mobile robots is not the orthodox method; thus, this feature on its own is quite innovative. Subsequently, I decided to integrate this stack to MoveIt to exploit the API fully.
Orchard Exploration Use Case
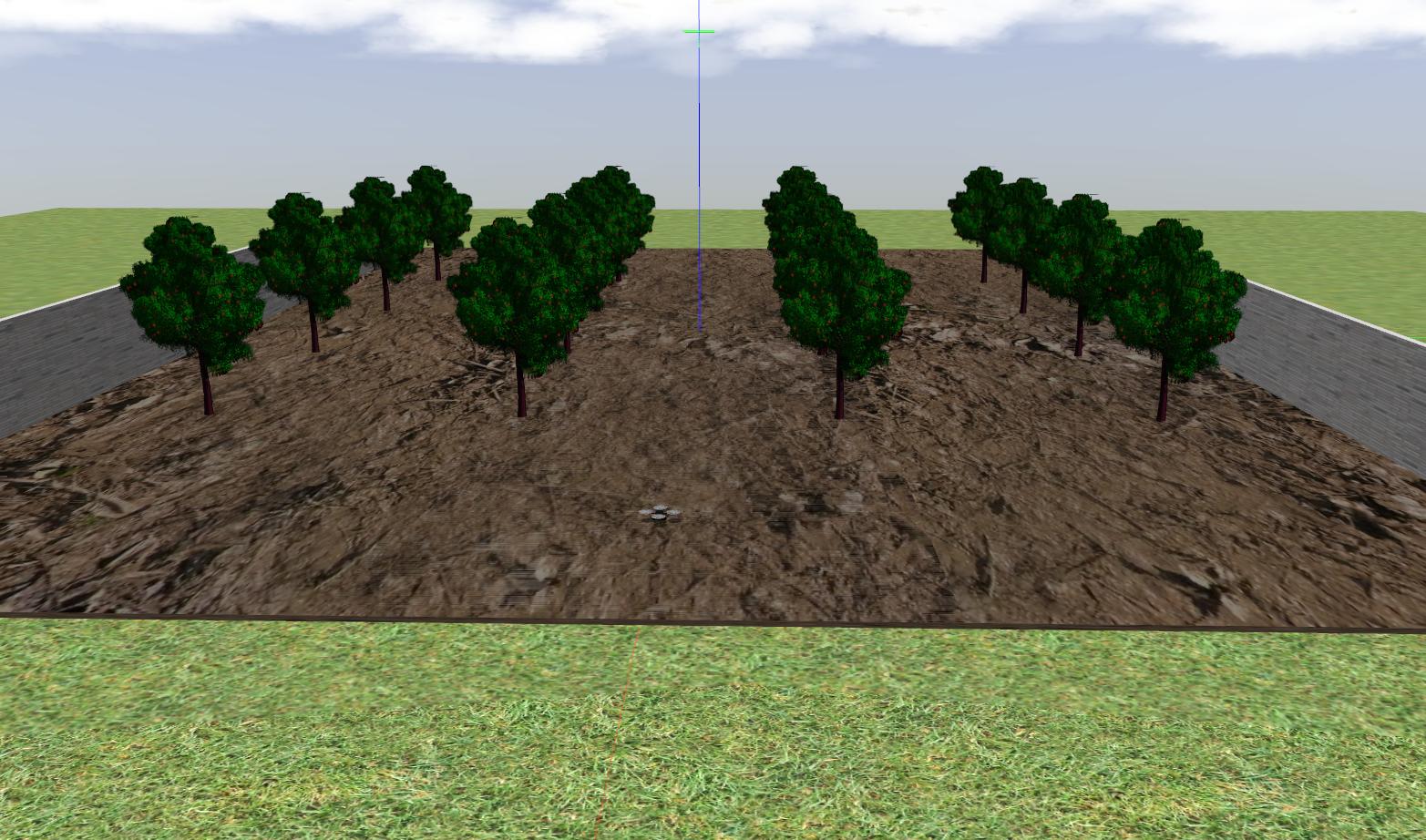
Integration with MoveIt for using the API was non-trivial but realized eventually. The next step was to create a use-case that would prove the usefulness of the developed method. I crafted a simulation of an orchard where the robot explores with maximum efficiency.
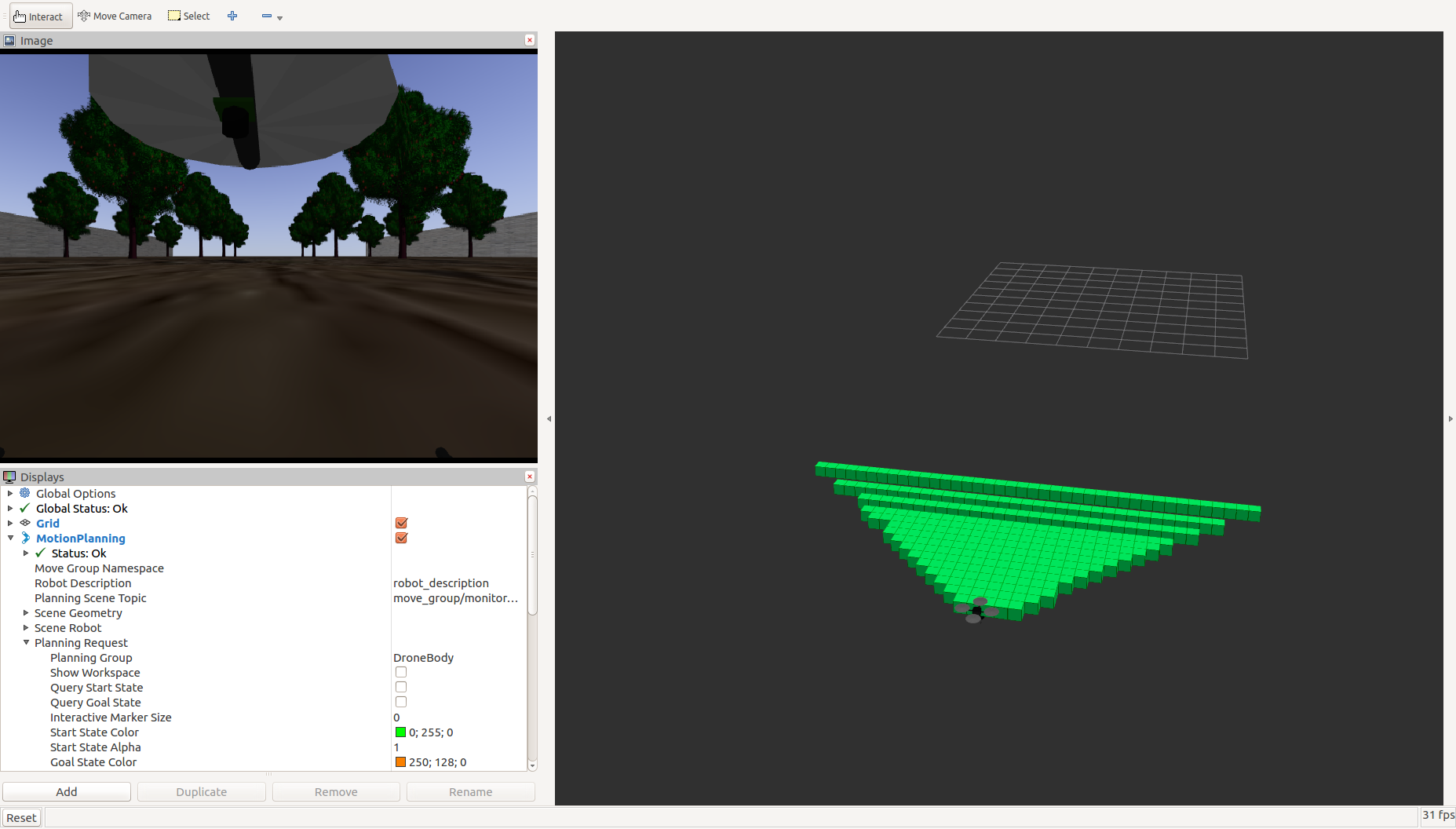
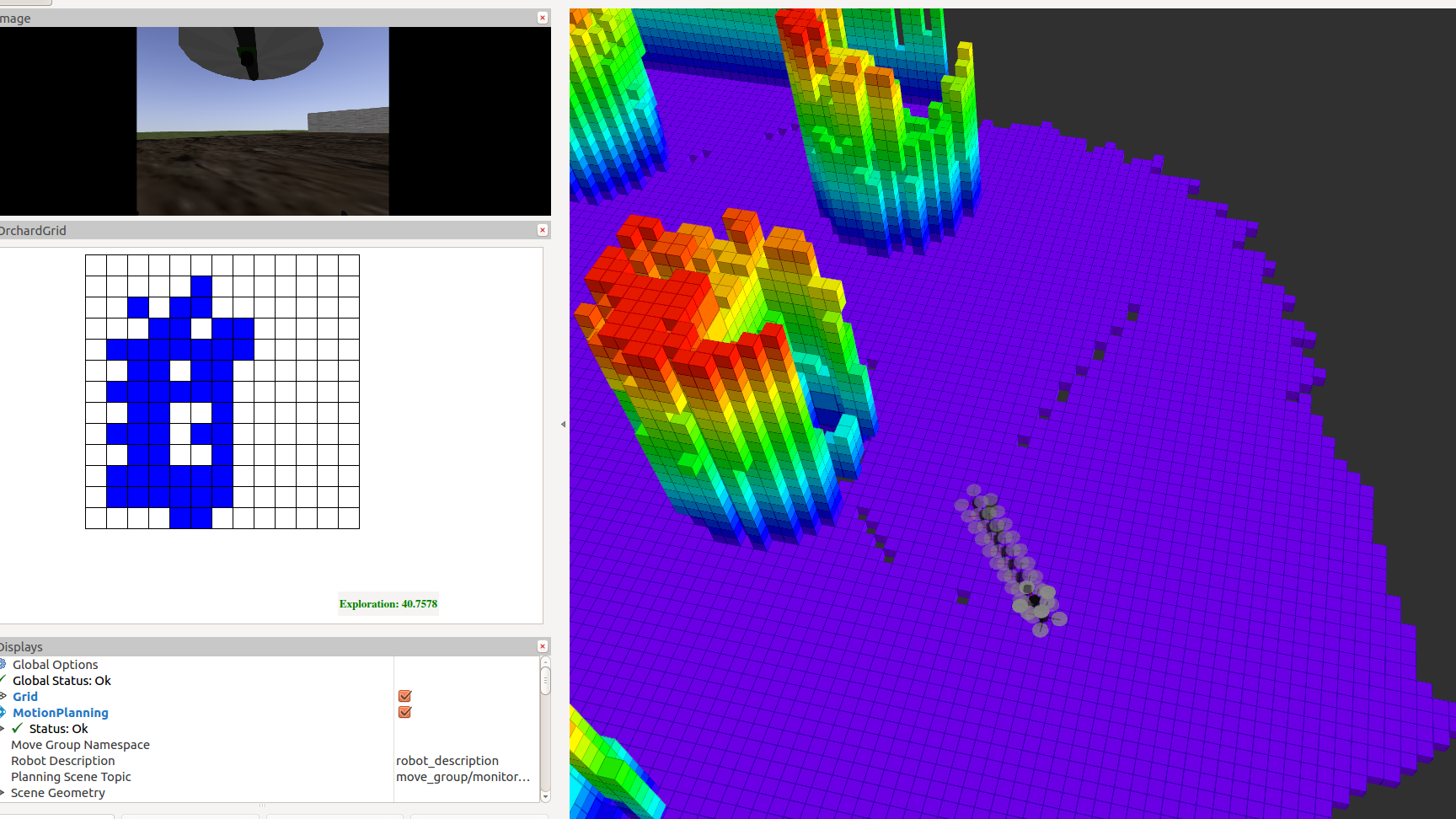
The exploration package is implemented with MoveIt (how) in the low-level and with different exploration metrics that determine the motion primitives (where) in the high-level.
Simulation Gallery