Building the Brains of Robots
Robotics Software Engineer specialized in manipulation, motion planning, and AI-driven control systems. Please reach out for consultance inquiries.

Robotics Software Engineer specialized in manipulation, motion planning, and AI-driven control systems. Please reach out for consultance inquiries.
Built hissevergibeyan.com to automate tax calculations for Turkish investors.

Senior Robotics Software Engineer
6+ years developing manipulation pipelines for Aeo humanoid robot. Leading behavior design, motion planning, and safety-critical systems for autonomous service robots.

Human-Robot Interaction
Collaborative pick & place with UR5 manipulator and Kinect 2. Features real-time human recognition and safety layers.
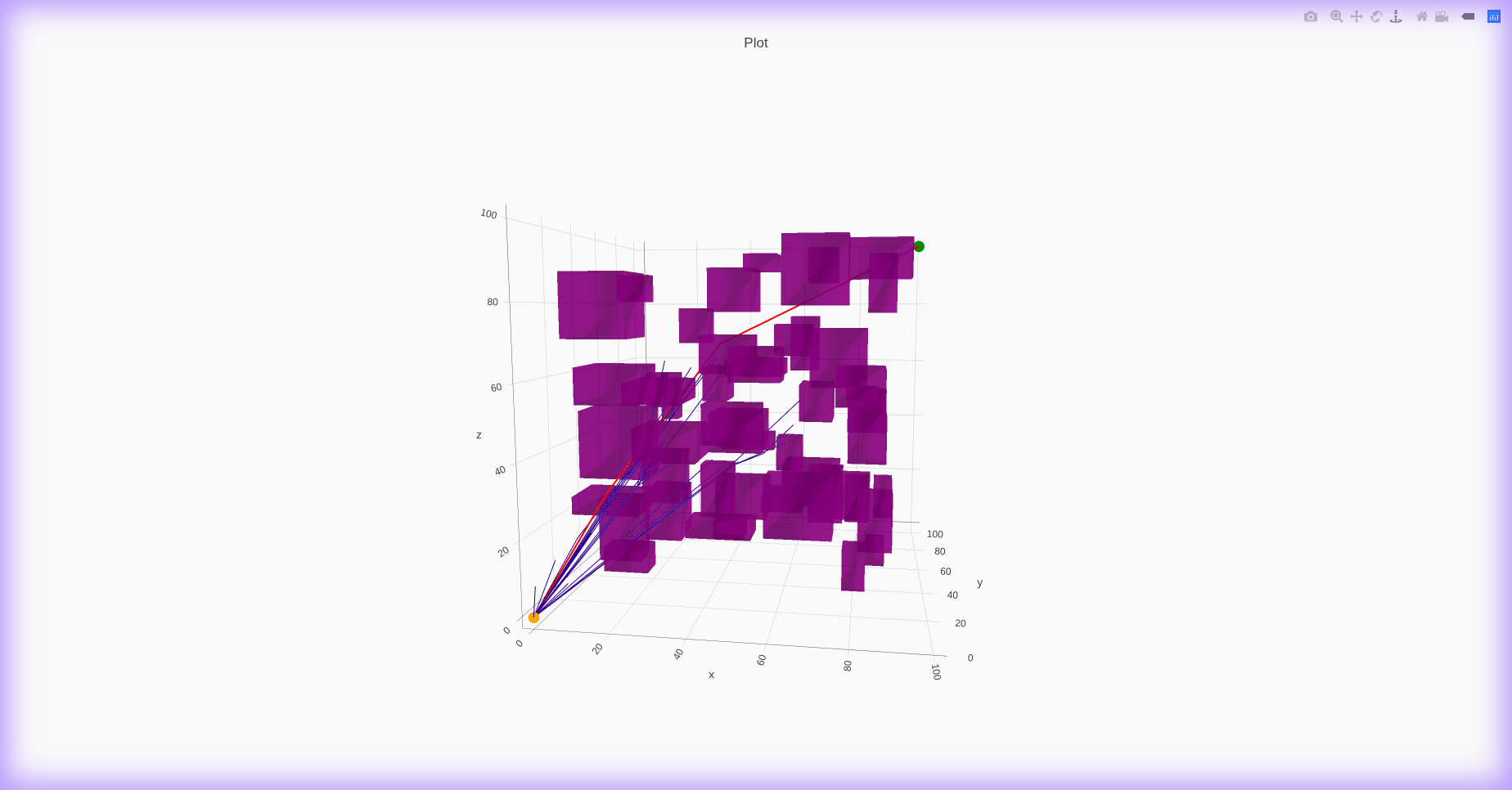
Path Planning
High-performance C++ library for RRT, RRT*, and BiRRT* algorithms using Template Meta-Programming.

Fintech - Tax Automation
Tax-reporting assistant automating profit/loss calculations for Turkish investors trading on foreign exchanges.
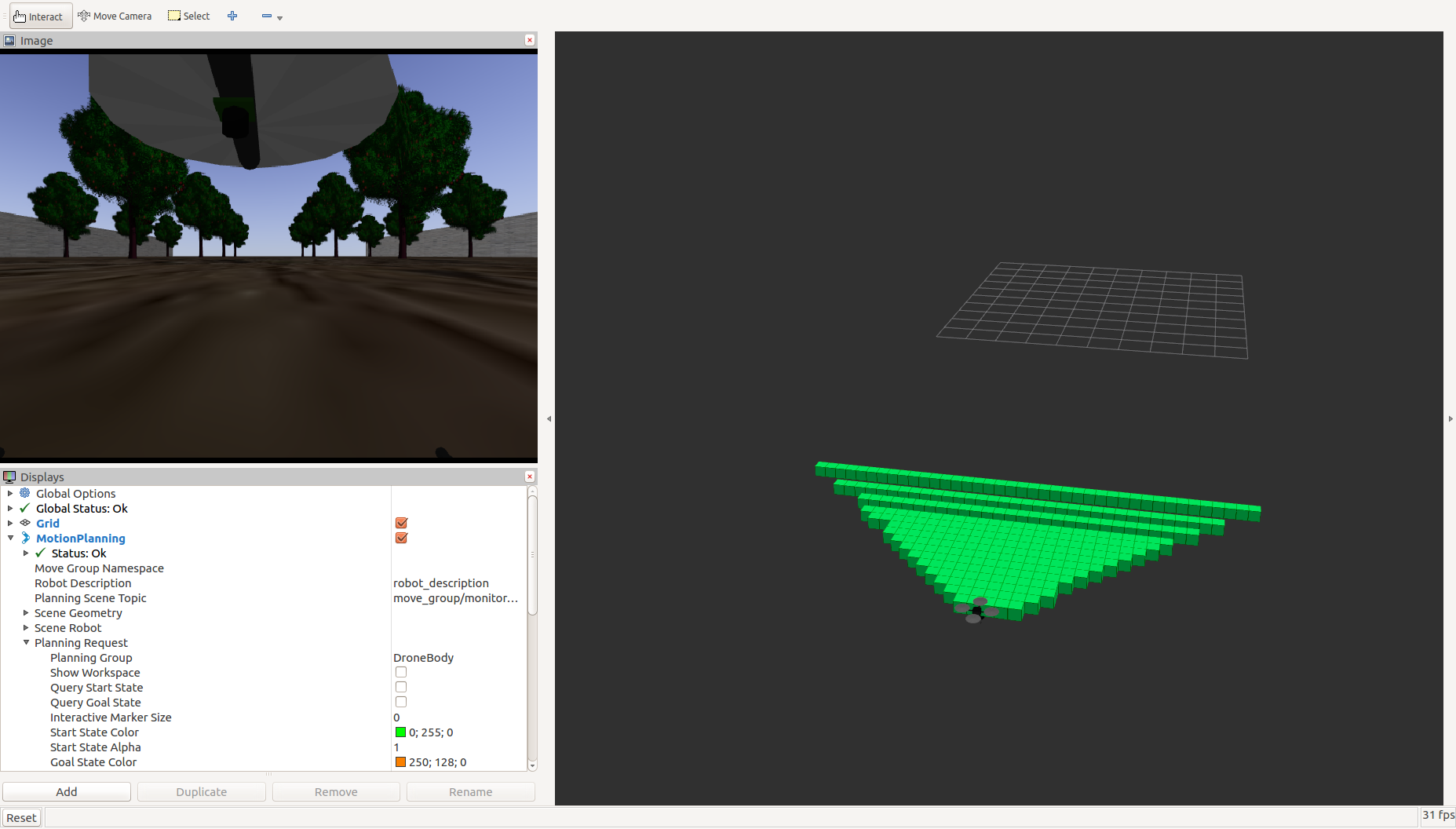
Manipulation & Control
Integrated MoveIt framework with Hector Quadrotor stack for innovative aerial manipulation capabilities.
Sim-to-Real
Comprehensive Gazebo stack for DJI M100 supporting both HITL (Hardware-in-the-Loop) and SITL modes.